VORC 2020
Set up the ROS environment Locally
- Install ROS according to the ubuntu version.
- Set up the basic workspace.
- Work around the husky Bot
- Set up the teleop Keyboard controls for Husky
Set up the Local Environment for VORC
- Clone VORC files from github.
- Build the workspace on VORC.
- Install and Run Gazebo on system.
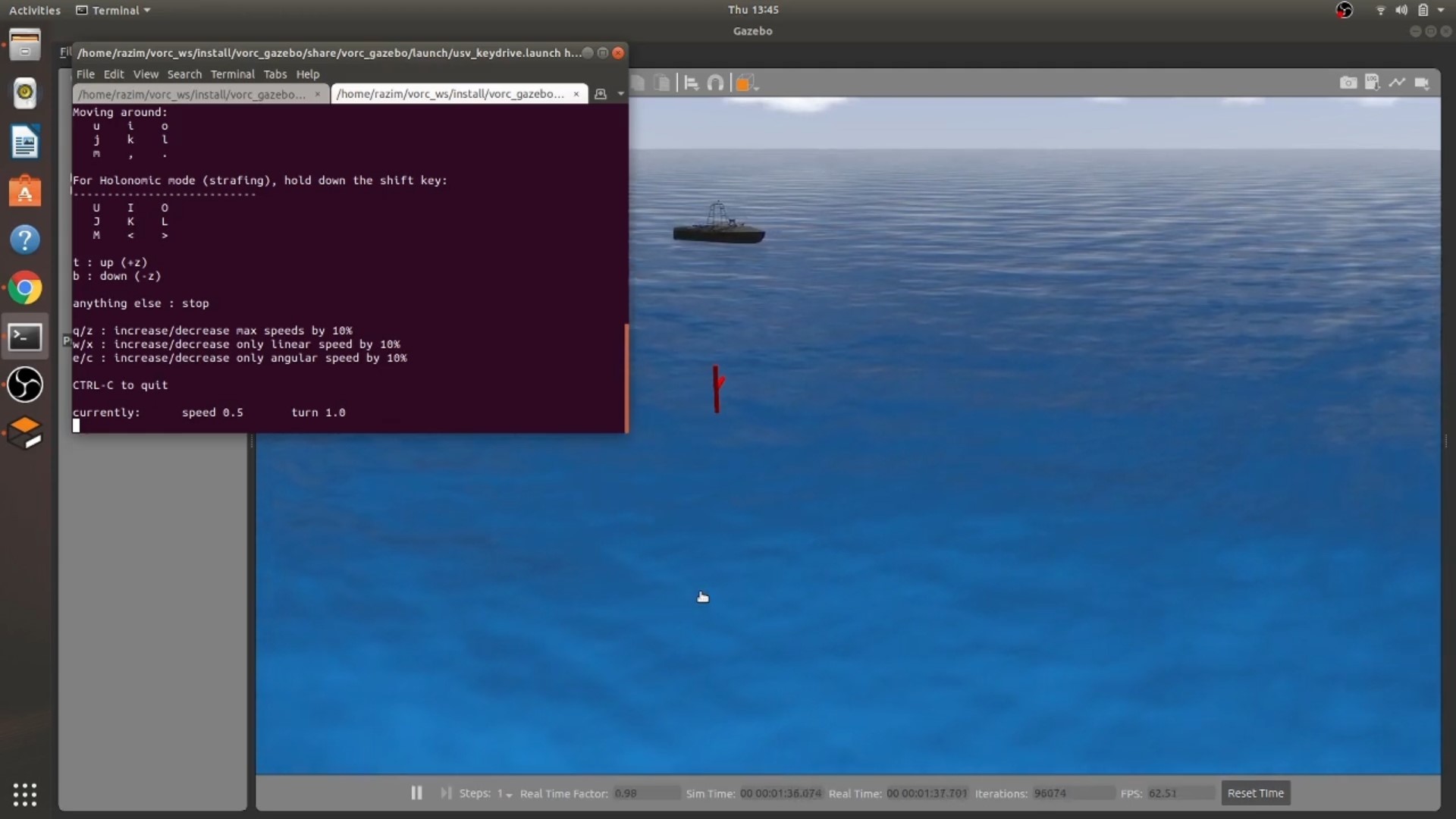
- Run gazebo and VORC (bot) virtually
- Clone the teleop keyboard files
- Build it on same directory as of VORC
- Control the VORC(bot) via keyboard using Teleop key board.
For Submission
- Record a 2 min video of running VORC.
- Edit the video.
- After final Editing Submit it on Youtube.
References
-
Final Video
-
Snapshots of the Project