Acoustic Source Localization Subsystem
Under AUV during Summer 2020
This is first in a series of (to be submitted) reports in order to build Acoustic Source Localization System for our AUV
Summary/Abstract#
One of the possible ways of localizing an AUV for Navigation purposes is to determine the location an acoustic source wrt itself and calculating the relative positions accordingly. Therefore the task for Sound Source Localization or SSL is extremely important. In this report I have covered the most basic aspect of SSL which is localization of sound source in a plane using 2 microphones.
Content#
- Introduction
- Technologies Used
- Methodology
- Results and Performance
- Problems faced
- Conclusion and Scope ( proof read required!!)
- Further Development
- Resources
Introduction#
Most of the EM Radiations especially RF waves are easily absorbed by water and hence modern localization systems as well as communications system are rendered useless underwater. Underwater Vehicles need to utilize an alternate wave to perform these operations. One such and possibly the most feasible option is Sound. Moreover, Acoustics has already been used in SONARs and so there has been considerable development in its associated technology.
For navigation there is always requirement of a good Positioning system, similar to GPS for terrestrial travels and navigation. One such basic approach is to develop a positioning system with respect to a stationary or terrestrial tracked sound source. This concept is also called Sound Source Localization or Acoustic Source Localization. There are many other applications of this technology as well.
SSL#
There have been various techniques and methods developed for SSL[2]. Multilateration has already been in application for many years. Others methods are Beamforming, Eigen Vectors based, Neural Networks based, etc. To read in detail click Here for a Review paper on SSL.
We have used Multilateration from the possible options as it is simple and requires lesser equipment. To quote Wikipedia, Multilateration is a navigation and surveillance technique based on measurement of the times of arrival (TOAs) of energy waves (radio, acoustic, seismic, etc.) having a known propagation speed. Prior to computing a solution, the time of transmission (TOT) of the waves is unknown to the receiver.
There are 3 common techniques under multilateration viz. Received Signal Strength (RSS), Time of Arrival (TOA) and Time Difference of Arrival (TDOA[1]).
As pointed out in this paper,
the accuracy of TOA- and TDOA[1]-based localization techniques is better than that of RSS-based localization technique. Moreover, the TOA-based localization technique requires knowledge of the transmission time of the received signal from the transmitter, which is not necessary for TDOA-based localization technique.
Thus, we focused on TDOA-based localization technique.
SSL: TDOA#
One of most used multilateration techniques is TDOA [1] or Time Difference of Arrival method. It is similar to Inter-neural.
Consider the simplest case of Multilateration and TDoA for sound source localization.
Take for instance a sound source S or P and two detectors or microphones M1 and M2. The simplest case is to determine on which side does the source lie with respect to the center of line joining M1 and M2. Let's refer this point as O.
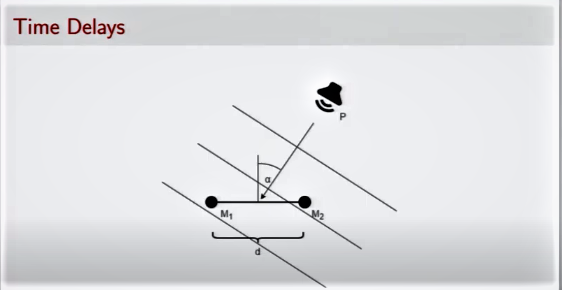
The possible answers to the Questions "Which side does the source S lie with respect to O, M1, M2?" can be right or left. A more accurate answer could the angle in degrees or radians subtended by source S( P in picture) at O from Line M1,M2. Determining this angle in essence is a rudimentary form of Sound Source Localization.
Due to the unsymmetrical arrangement of Source, there will be a phase difference and hence a path difference in the waves received by M1 and M2. Calculating this path difference can help calculate the angle.
Practically, instead of calculating path difference, it is preferred to determine Time difference between the arrivals of sound at the two detectors or microphones. Hence, the technique is called Time Difference of Arrival method or TDOA
Most of the development in this technique has been on improving the accuracy of calculation of Time Difference of Arrival. It has been either Hardware based improvement or more accurate Mathematical approximation to the process of determining TDOA. The mathematical improvements have been focused on Cross-correlation is performed. The most famous being GCC, GCC-PHAT and SRP GCC-PHAT.
Technologies Used#
Language: Python 3.7
Libraries:
- PyAudio 0.2.11
- SciPy 1.4.1
- NumPy 1.18.1
- LibROSA 0.7.2
- Matplotlib 3.2.1
Technique : TDOA (Multilateration)
Hardware:
- 2 Microphones ( Samsung in-ear Headphones )
- 2 Audio to USB convertors[4], which are basically Sound Card Controllers.
- Laptop

Methodology#
We have simply tried to determine the direction of arrival with a resolution of 90 degrees!!. In simple terms : left or right. We placed the two microphones at distance of approximately 20cm and connected them to the computer via audio to USB convertors (sound cards).
Two different Object Streams created by PyAudio keeps listening to the ports on which microphones were attached. We get two different Audio Signals. Remove noise and smoothen the signal. Also, we filter-out irrelevant sound based on frequency.
Calculate Time Delay#
Now, we try to calculate time delay between two different audio signals to as to get the Azimuthal angle. The reason to do so is as shown in the formula:
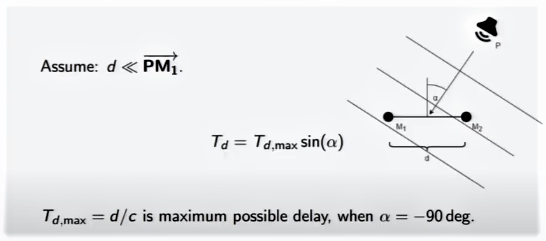
This Time Delay, Td[1] is calculated using a mathematical operation called Cross-correlation and finding cross-correlation coefficient Rxy[3].
Correlation coefficient of any two signals is a measure of similarity between them. Hence, the value of Rxy[3] will be highest when signals are most similar and lowest when least similar or most dissimilar.
Since, the two audio signals we received are same signals but shifted in Time their Rxy[3] will be maximum when this time shift is equal to Time Delay Td[1]
Perform Rxy[3].
We haven't gone with the sophisticated way of calculating TDOA or improving the accuracy of Cross correlation using GCC (Generalized Cross-Correlation). We simply determined the sign of Rxy[3] (Cross Correlation Coefficient) and determined the orientation.
We didn't try it practically, but a simple numpy.argmax() of Rxy gives the TDOA, which can be used for Angle Calculation as mentioned above.
Results and Performance#
Work is incomplete to mention any result.
-
Resolution: not Measured Yet.
-
Accuracy: Works in some cases.
Problems faced#
Lack of Audio jack ports#
The first problem was the lack of no. of input AUDIO ports. Most of the Microphones currently support AUDIO jack as input to the system. There is mostly a single USB jack port available in a PC, Board, etc. It was very difficult to receive acoustic data from 2 different devices at the same time.
Our Solution#
We used audio jack to USB convertors since there are multiple USB ports available in most of devices. Also, PyAudio provides support to create two independent streams to listen to different audio ports. Hence, we were able to collect and process data from two different microphones simultaneously.
Conclusion and Scope#
SSL is very important and essential capability to be possessed by any group involved in Underwater Vehicles. Once a successful in-house prototype has been developed, it sets-up a platform to improve further in the direction of Underwater Sound/Acoustic Processing. Furthermore, it also opens up a whole new domain wherein people (students) can work and most importantly explore.
Also, localization technology is a cross department field and there are numerous future possibility of research, especially when utilizing Neural Networks.
Further advancement in underwater communications will be probably powered by Sound based Routers and Sound WiFi. These are just to name a few.
In conclusion, it won't be an understatement to say that
If Underwater is the least explored part of the Earth then Sound shall be the key to open it up for us.
So, for the future development of the club and for a world-class underwater vehicle acoustic system is something we must procure.
Further Development#
Currently our project is in very primitive stage where we have only focused on collecting data and verifying it. It was a crucial step but still there is a very large way to go.
Next update is to develop a 360* acoustic locator which can work for the whole plane using 3 or 4 microphones.
Later on this Tech has to be transferred to Underwater Localization using Hydrophones.
NOTE: ** many improvements and proof reads required in Theory section.
Resources#
- A good Tutorial on TDOA
-
SSL Introduction Video with good explanation
- ODAS: An open source Multiple Sound source Localization system ODAS Paper Link
Footnotes#
[1] TDOA: Time Difference of Arrival
[2] SSL: Sound Source Localization
[3] Rxy : Cross-correlation coefficient. Mathematically similar to a Convolution operation. Read more about Cross-correlation on Wikipedia
[4] Quantum. QHM623 3D Virtual 5.1 USB Audio Controller Sound Card (Integrated 2 Channel)